



機器人第七軸適用范圍:適用于機床工件上下料,、焊接、裝配,、噴涂,、檢驗、鑄造,、鍛壓,、熱處理、金屬切削加工,,搬運,、碼垛等工作。產(chǎn)品特點:1,、多自由度運動,,每個運動自由度之間的空間夾角為直角。2,、自動控制的,,可重復編程,所有的運動均按程序運行,。3,、一般由控制系統(tǒng)、驅(qū)動系統(tǒng),、機械系統(tǒng),、操作工具等組成,。4、主要配件采用高級進口品牌及國內(nèi)有名品牌,。5,、高可靠性、高速度,、高精度,。6、可用于惡劣的環(huán)境,,可長期工作,,便于操作維修。7,、各個機器人行走軸,,均可采用滾輪導軌,具有可高速運行,,安裝調(diào)試方便,,適合長行程應用,可用于惡劣環(huán)境等優(yōu)點,。機器人第七軸 ,,就選上海巨勛智能科技有限公司,歡迎客戶來電,!江蘇檢驗行業(yè)機器人行走軸功能

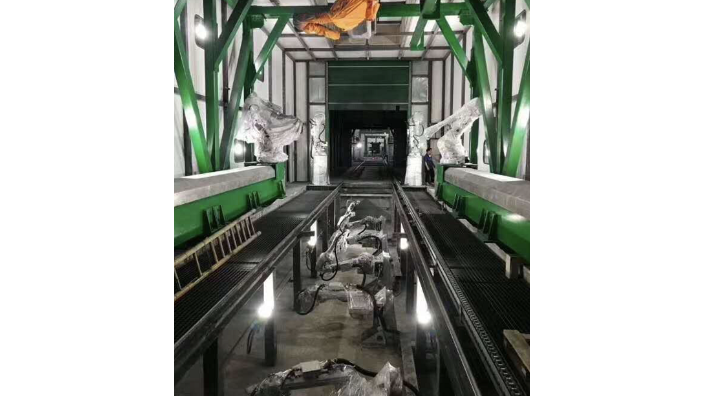
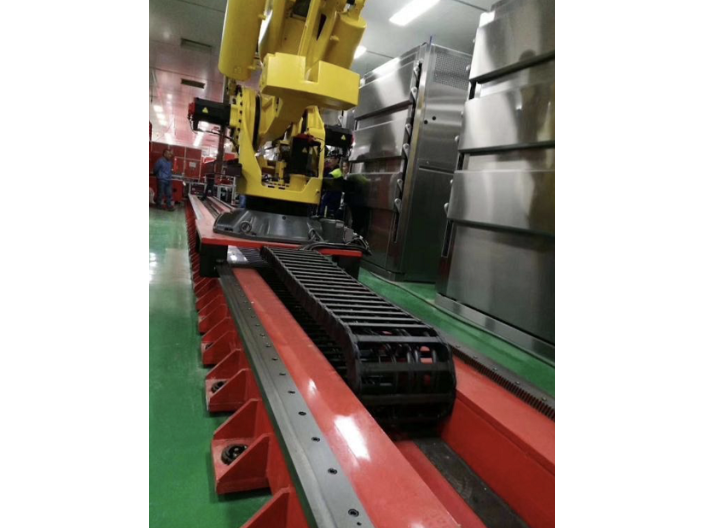
機器人第七軸的組成結(jié)構(gòu):機器人第七軸行走軌道系統(tǒng)主要有導軌基座,,安裝機械手的移動小車,控制系統(tǒng),,安全與防護裝置組成,。導軌基座采用優(yōu)良鑄鐵鑄造而成,長度根據(jù)客戶的實現(xiàn)需求定制,,基座鑲?cè)敫呔葷L輪直線導軌和精密模數(shù)齒條,,線性軸裝有潤滑系統(tǒng),能持續(xù)提供自潤滑和除塵刮屑系統(tǒng),。安裝機械手的移動小車承載能力3000KG,,移動小車與機械手的鏈接尺寸符合通用機器人。伺服電機為主驅(qū)動通過變速器驅(qū)動齒輪齒條在導軌上行走,。。浙江焊接行業(yè)機器人行走軸多少錢上海巨勛智能科技有限公司力于提供機器人第七軸 ,,期待您的光臨,!
近幾年,跟著原材料價格和勞動力成本的上升而產(chǎn)品銷售價格的獲利空間減小,,新一代工人不肯重復簡略工序和接受車間作業(yè)環(huán)境的背景下,,大部分的制作企業(yè)正考慮怎么轉(zhuǎn)型晉級,,怎么改動出產(chǎn)方式,以此來前進出產(chǎn)功率,、節(jié)約出產(chǎn)成本和前進獲利空間,,來取得生計開展。擴大機器人工作范圍,,提升效率的機器人第七軸是不錯的選擇,。選購機器人第七軸前需要提前了解哪些相關(guān)問題?機器人第七軸所配的機器人品牌,、型號,;機器人第七軸的有效行程及總長;機器人第七軸安裝方式(吊掛式/地面安裝/側(cè)掛安裝),。
控制系統(tǒng)有主控制柜,、主開關(guān)、熔斷器,、馬達過載保護,、低電壓保護、電源穩(wěn)壓,、變壓裝置,、操作面板和顯示屏等組成。伺服控制單元可以編程邏輯控制器滿足用戶的要求,。機器人第七軸在安裝時注意要點有哪些,?1、我們再給客戶工廠安裝的時候,,先考慮客戶工廠的環(huán)境,,地軌安裝的地方,不能有腐蝕性很強的化學產(chǎn)品,,因為地軌本身的材質(zhì)都是金屬,;2、地軌本身材質(zhì)要好,,耐磨性要強,;3、地軌的埋設深度應與地上裝飾層相等或略高于3-5mm,;4,、地軌要安裝在水平的水泥地面上,不能有坑坑洼洼,。上海巨勛智能科技有限公司為您提供機器人第七軸 ,,歡迎您的來電哦!
在當今的制造業(yè)中多關(guān)節(jié)的工業(yè)機器人運用已經(jīng)十分普遍了,,可是一般來說,,作為標準產(chǎn)品的工業(yè)機器人,在固定裝置的情況下,,單臺工作范圍肯定會遭到本身臂展長度的限制,。機器人第七軸有地面裝置跟懸掛裝置兩種。機器人直接裝置到地面上的,,我們稱它為機器人第七軸地軌,,機器人第七軸地軌的裝置方法比較簡單,用戶只需要依照規(guī)劃要求,,運用特定的螺栓,,將其固定在契合相應技術(shù)標準的地基上而且進行模塊化的組裝即可,。還有一種便是機器人第七軸天軌,,要把機器人架到空中。上海巨勛智能科技有限公司力于提供機器人第七軸 ,,有需求可以來電咨詢,!寧波機器人地軌
機器人第七軸 ,就選上海巨勛智能科技有限公司,,讓您滿意,有想法可以來我司咨詢,!江蘇檢驗行業(yè)機器人行走軸功能
機器人第七軸的的安裝調(diào)試檢測方法:細調(diào)平,,調(diào)平后的檢查,在導軌上平均選擇5-8個點,,并標記相應的位置,準備好坐標紙,,將行走單元停于第1點,,將兩水平儀分別放于縱向和橫向,各取一合適的基準刻度作為零點,,分別在坐標系中標出第1個位置縱橫坐標水平度對應的點,,接著移動到第2個位置進行同樣的操作,直至完成所有點的測量,,在坐標紙上將各點位置相連,觀察波峰波谷走向以及波峰波谷極值的差值,,在波峰波谷的位置進行細調(diào)平,,使曲線平緩,且峰谷差值在要求公差范圍之內(nèi),,調(diào)好后再在對應的位置進行測量和記錄,各位置記錄完成后再回到各位置看讀數(shù)是否發(fā)生變化,,若幾乎無變化則表明調(diào)平成功,,緊固拉緊螺栓后再檢查各位置,確保水平無變化,。江蘇檢驗行業(yè)機器人行走軸功能